Academic Project
Autonomous Ultrasonic Radar Scanning System
Built on a Raspberry Pi Pico using ARM assembly to coordinate a servo sweep and capture ultrasonic distance samples, producing repeatable 2D range sweeps from real measurements.
Live Scan Demo
Servo-driven sweep capturing distance returns across angles, demonstrating stable timing and consistent scan behavior across repeated passes.
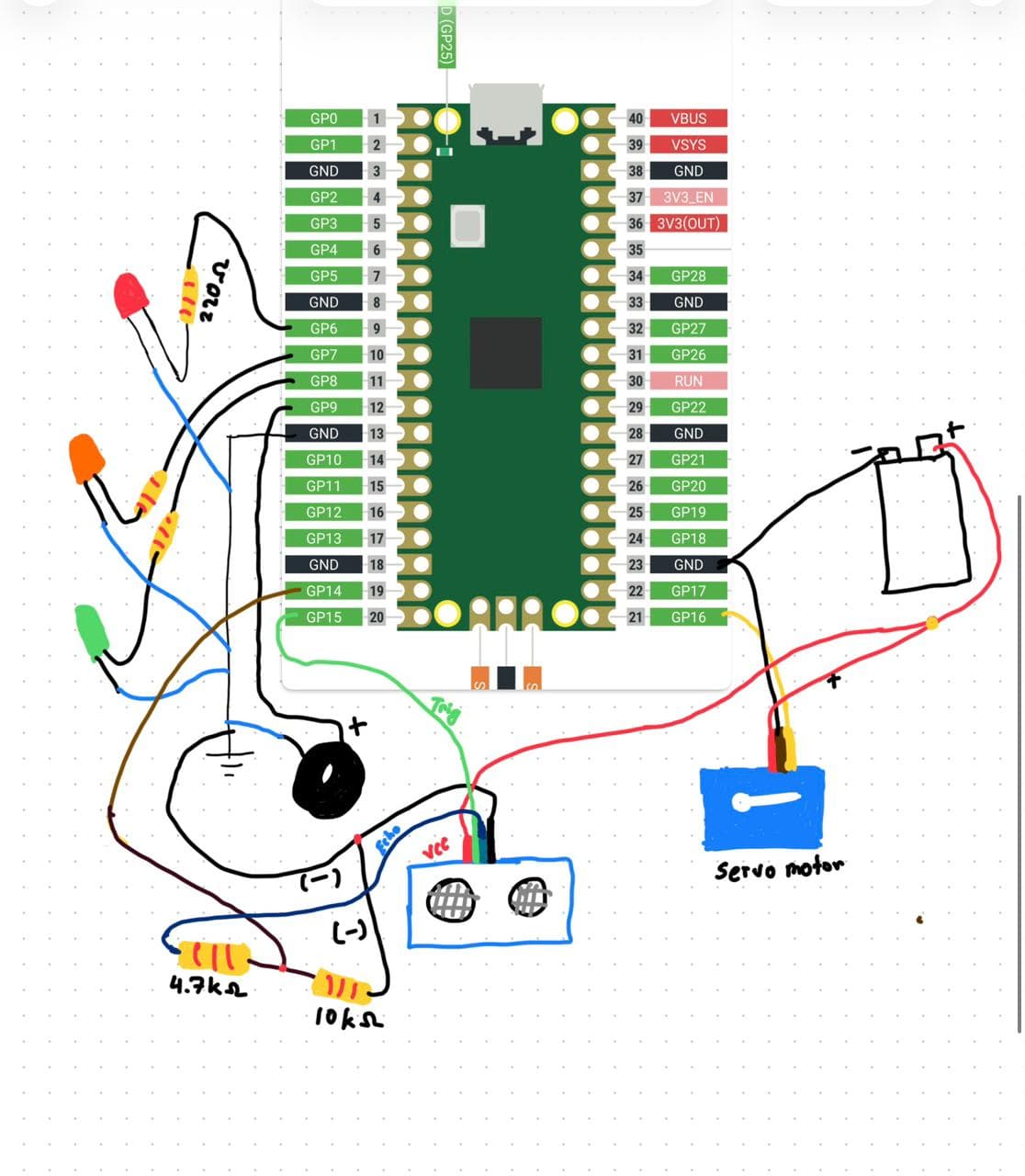
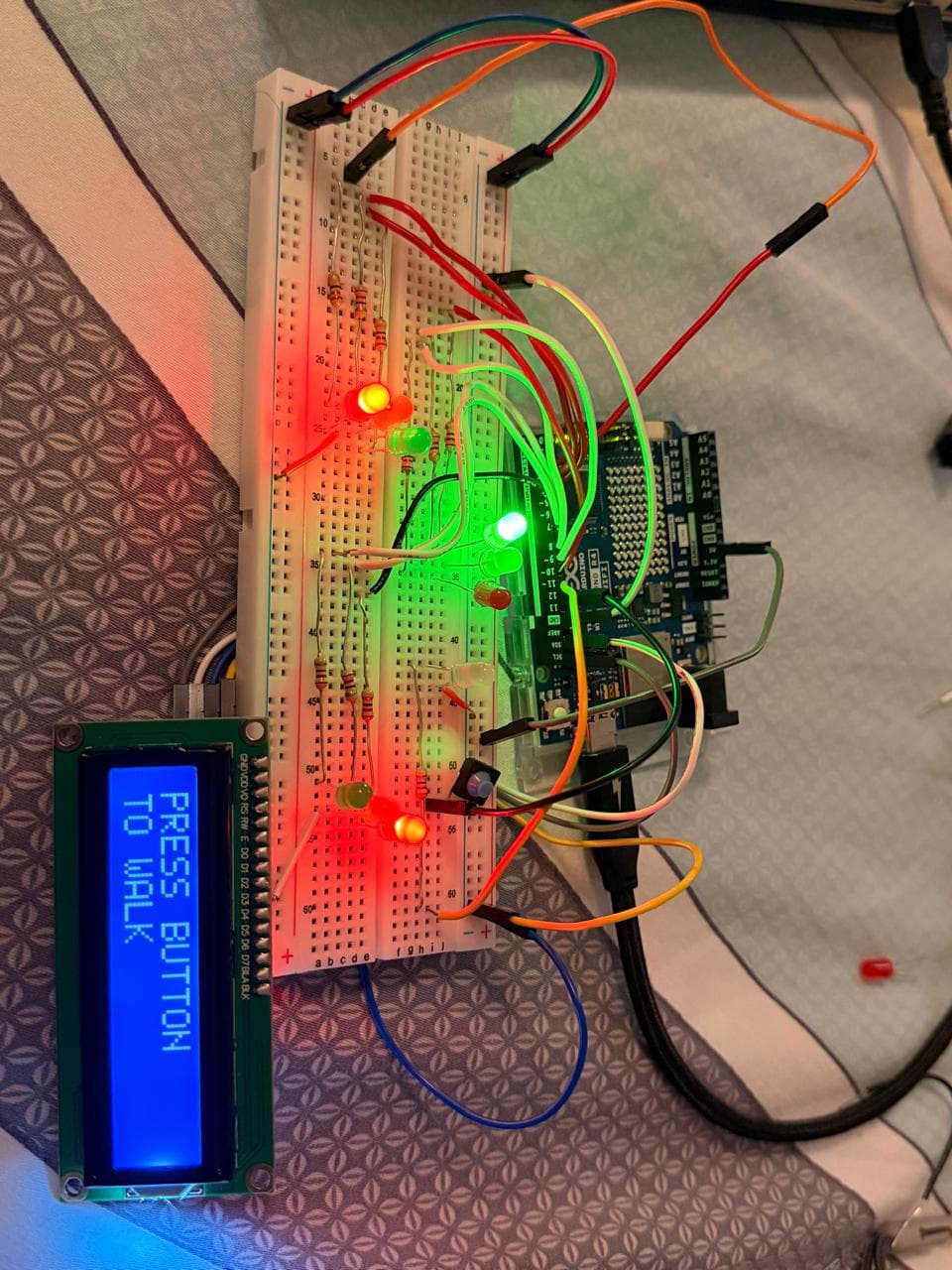
System Build
Pico + ultrasonic module + mechanical mount assembled for repeatable calibration runs, clean alignment, and consistent measurement geometry.
Highlights
I wrote low-level timed GPIO routines in ARM assembly to generate consistent trigger/echo timing and stable servo step movement. The scan routine used controlled step size and dwell time to reduce jitter and improve sweep repeatability across angles. I validated distance readings using known targets across multiple runs, logging results to confirm consistency, and documented calibration steps such as servo centering, sensor offsets, and mounting alignment so the build can be reproduced quickly.